The Hanson Robotics / University of Texas paper Upending the Uncanny Valley was an interesting and somewhat frustrating read. While I ultimately agree that the pursuit of humanlike robots is a worthwhile endeavor (and welcome the advances these groups are making toward that goal), I had a hard time focusing on the majority of the content in the article because I found myself angry at the psuedo-scientific manner in which the concepts were portrayed.
The article begins with a statement that "the myth that robots should not look or act very humanlike is a pernicious one in robotics research, one commonly known by the term 'Uncanny Valley'." I'm not sure how they came to this definition, but I would argue that it is both wrong and misleading.
As far as I'm aware, the uncanny valley refers to depictions of humanoids that are somewhat realistic, but not realistic enough to be truly convincing--leading to cognitive dissonance and a negative emotional response from most human beings. This is different from the claim that "robots should not look or act very humanlike". Essentially, humanoid robots should be purposely cartoonish or convincingly lifelike, otherwise they are creepy.
I do appreciate the fact that "the robots of David Hanson do not tiptoe around the uncanny valley, but dip in and out of the uncanny in attempt to chart the territory and its boundaries", as I think this is the best way to make progress in building lifelike androids.
The paper further notes that "the Uncanny Valley has never been studied with real people", so, they wanted to "put the theory to the test with human subjects." However, their approach to doing this is to run a set of web surveys, the results of which they then interpret to mean that "there does not appear to be an inherent valley."
Unfortunately, the article makes no mention of the survey design or methodology, which left a bad taste in my mouth. It seems to provide a very convenient vehicle for a robotics company that builds realistic-ish robots to push their agenda.
In order to determine if their findings are worthwhile, it would be helpful to know several things, such as: How large was their sample size? How were these people selected--was it randomized? Were the people chosen already familiar with Hanson Robotics' work? If so, were they more likely to find a psuedo-realistic robot agreeable versus a random person who would find it uncanny? How does their familiarity with robotics and/or the robotics industry prejudice their viewpoint? Do these same people react differently to psuedo-realistic robots in person versus on a computer screen?
Without the answers to those questions, and a more in depth analysis of the results, it seems disingenuous to claim that no valley is inherent and "a new theory is called for."


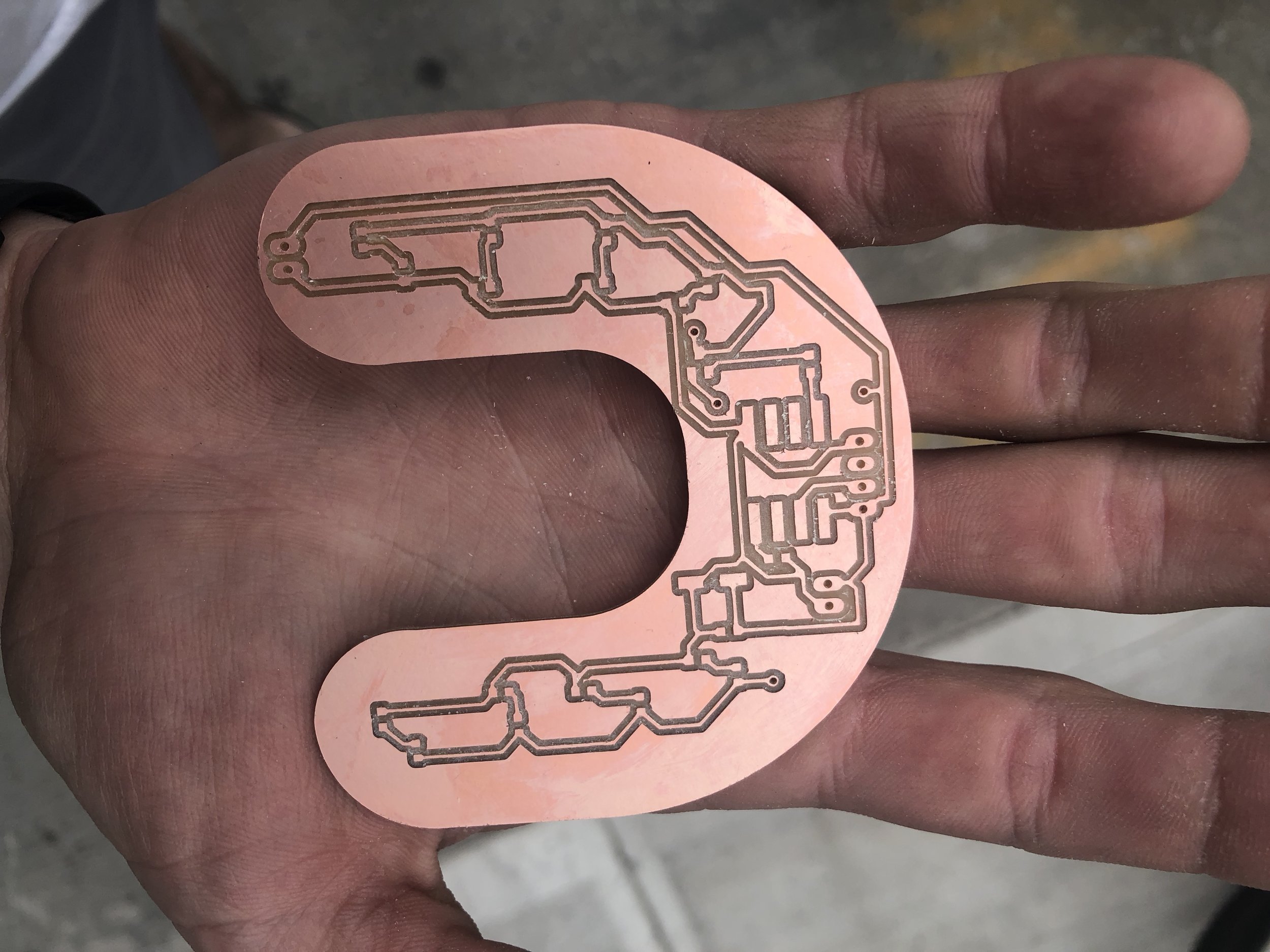
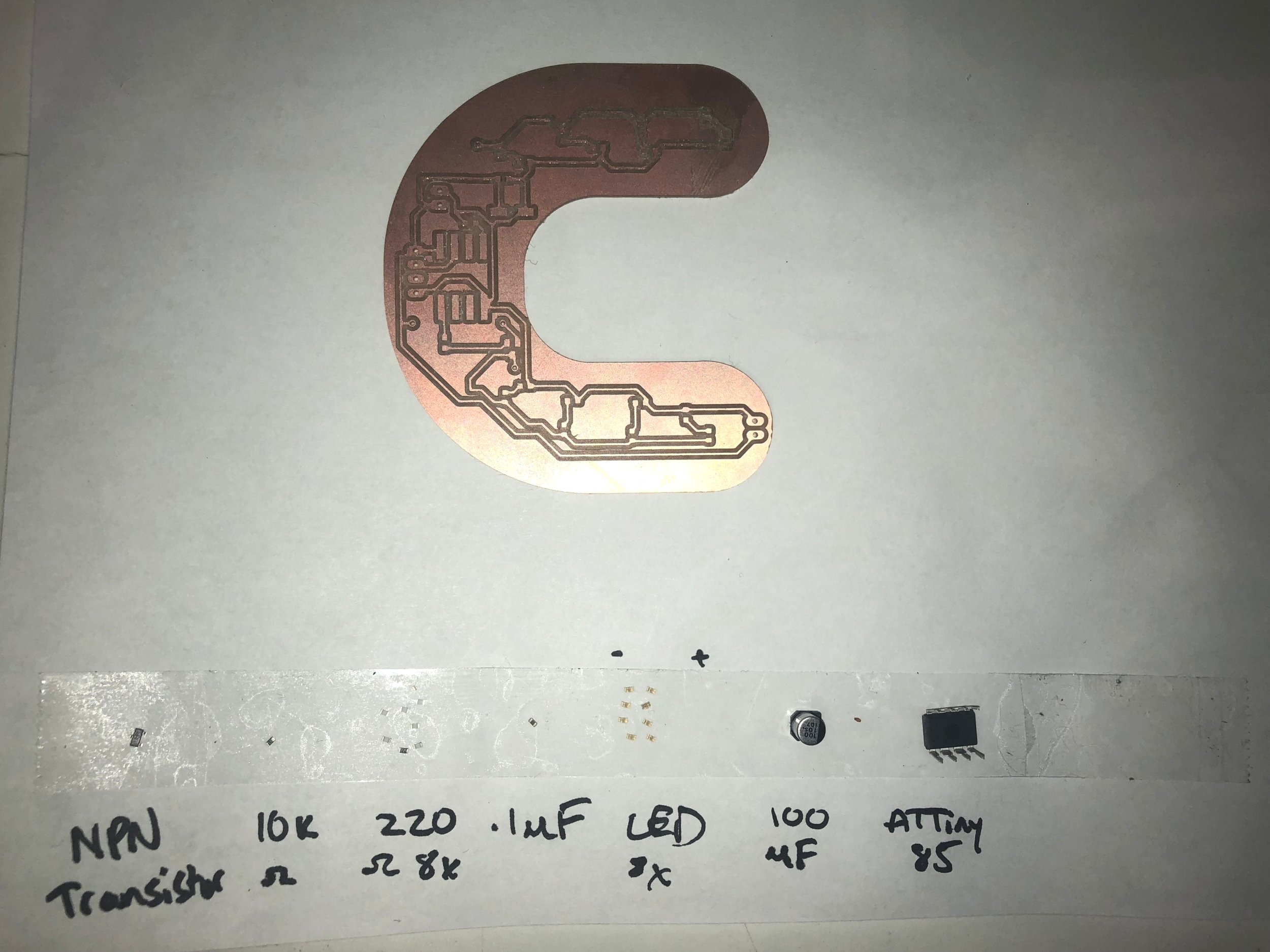
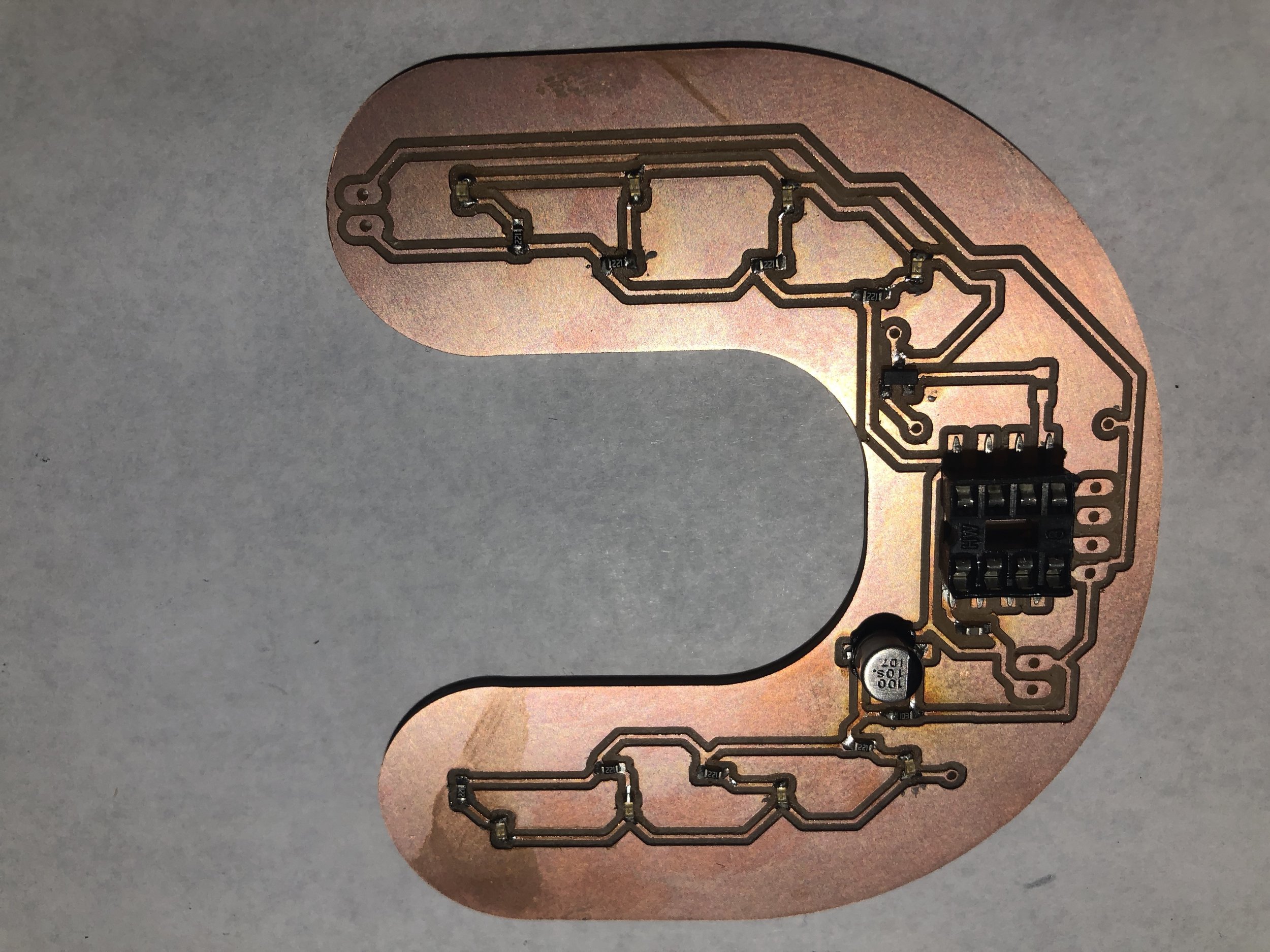































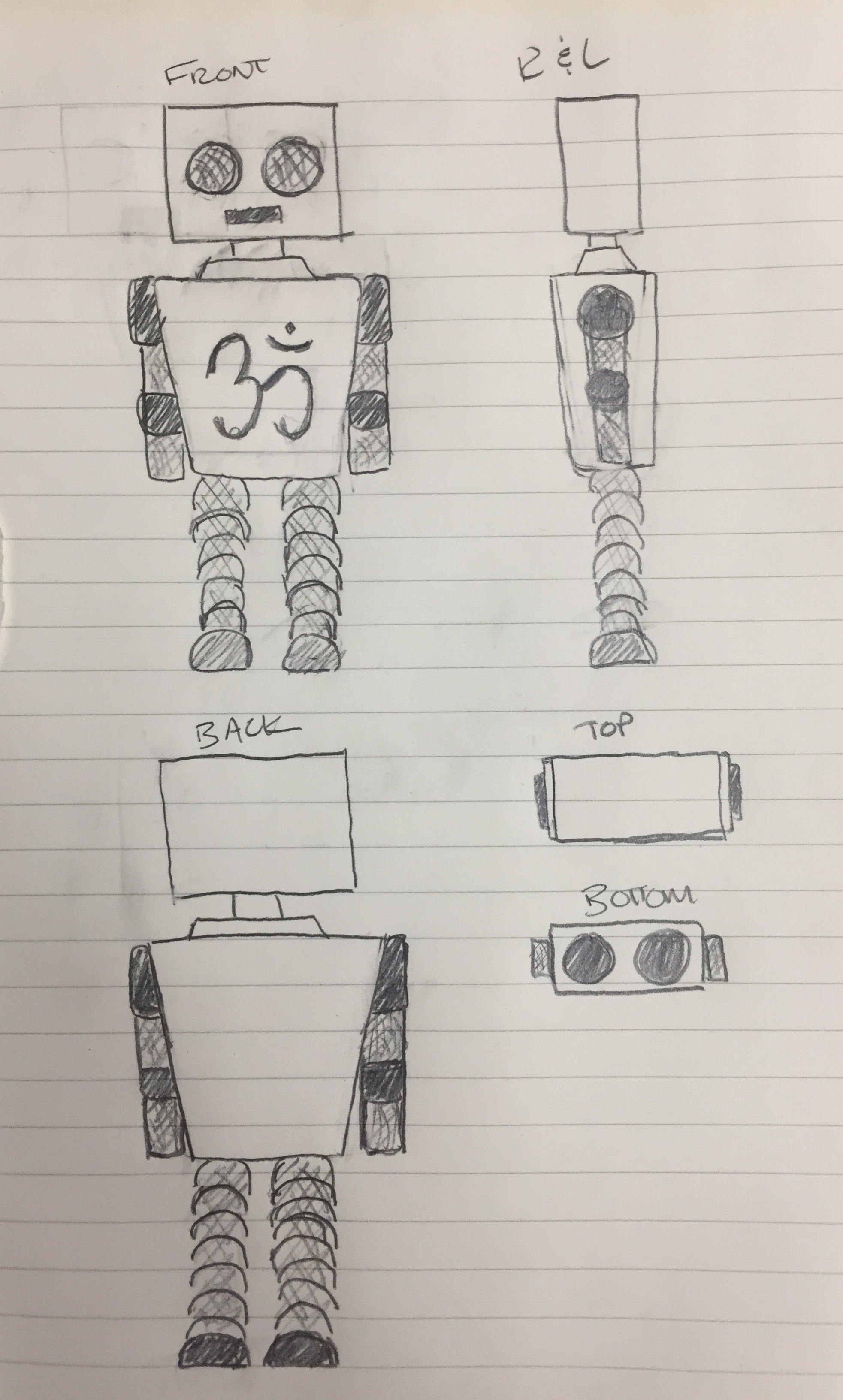
 Continuing work on my original character for Art Toy Design, current named Yoga Bot 9000. Bringing him into 3D was a fun and interesting challenge--how does a robot with no elbow/knee joints do yoga?
Continuing work on my original character for Art Toy Design, current named Yoga Bot 9000. Bringing him into 3D was a fun and interesting challenge--how does a robot with no elbow/knee joints do yoga?















 [/one_half][one_half_last]
[/one_half][one_half_last]